基于策略的算法(2):TRPO, PPO
TRPO和PPO是两种基于策略的算法,它们的主要区别在于TRPO是基于约束的优化算法,而PPO是基于惩罚的优化算法。这两种算法都是在前面讲的策略梯度算法的基础上,通过一些技巧来提高算法的稳定性和收敛速度。
可以理解为REINFORCE-promax
on-policy转off-policy之重要性采样
我们前面说到Policy Gradient的on-policy方法(如REINFORCE)需依赖当前策略生成的数据更新策略,这样的算法让我们无法去完成寻找“某个区域内的优解”这样的行为(因为策略更新依赖于采样,采样依赖于策略,从而无法对策略进行多次探索之后再用采样更新,不支持跨策略重用)为了解决这个问题,我们可以引入一个onpolicy算法转化为offpolicy算法的数学工具,这个技术叫重要性采样(importance sampling)。但是在下面的PPO,TRPO之中,依然是on-policy的算法, 这里的重要性采样用于在采样之外探索更多的策略,采样重用从而提高效率,具体而言是暂时让“旧策略”去进行采样, 然后在“新策略”下计算这些数据的期望。
注意概念区分:on/offline与on/off policy
on/offline:offline是指采样和训练可以完全分开, 也就是说我们可以先采样一大堆数据, 然后再训练。而online则是指采样和训练同时进行, 也就是说我们每次采样一个数据, 就训练一次。
on/off policy:onpolicy是指我们在训练的时候, 采样的数据是由当前策略产生的。而offpolicy则是指我们在训练的时候, 采样的数据是由�另一个策略产生的。off-policy和offline算法虽然看起来好像差不多, 但实际上offline要控制的分布变化和大方差比offpolicy大很多, 需要专门的设计, 例如Q-learning之中直接学maxQ, 又或者结合重要性采样, 策略约束等多种手段
重要性采样的核心思想是,我们可以在一个策略下采样数据,然后在另一个策略下计算这些数据的期望。只需要补充一个权重因子。
在p1下采样一组数据
在p2下,只要乘以就可以让两个分布的期望相等
这个方法之所以很有用在于, 我们实际上并不能表达出p1, p2(他们是,神经网络), 但我们可以通过采样的方法来进行这个分布的转换
但需要注意的是方差很可能会变大,所以需要一些技巧来减小方差。这就引入了我们接下来的TRPO和PPO算法。
TRPO(Trust Region Policy Optimization)
先讲什么是Trust Region。 数学定义是, trust region 在内均接近目标, 就称为在的trust region。
我们的目标是减少策略迭代的方差, 让策略变化不要太大,那我们就可以在当前策略的附近找到一个trust region,在这次更新之中,我们只能在这个trust region内更新策略。这样就可以保证更新的策略不会变化太大,从而减小方差。也就是全局的Find 变为了在一个小范围内Find
结合两个思想, 我们就可以写出:
这里用重要性采样把消去了
而TRPO的目标是带约束的优化问题,我们的目标是找到一个使得最大,同时满足KL散度的约束,即
Find and
这个约束问题的求解是通过共轭梯度法求Fisher矩阵之类的数学方法求解的, anyway, 这是个纯数学问题,这里不展开讲
也因为这个约束问题的求解比较麻烦, TRPO实际使用并不多
至于其他的的部分, TRPO和REINFORCE是一样的
伪代码可能如下:
- 从经验回放池取探索性策略得到一个完整的MC episode
- 计算,这是一个MC的估计
- Approximation:
- Maximization: 不断反向传播
- 回到1, 清空经验回放池,重新基于新的策略采样
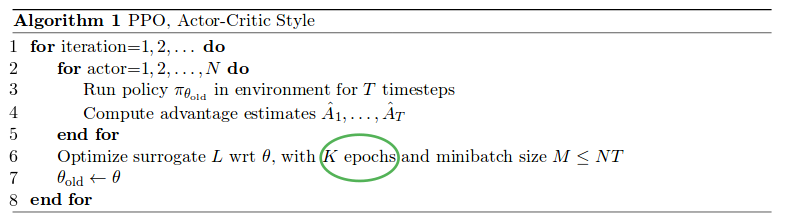
PPO(Proximal Policy Optimization)
主播主播, 你的TRPO计算还是太复杂了, 有没有更简单更有效的方法呢?
有的兄弟, 有的。像这样的方法,我们还有9个,其中一个就是PPO
PPO的思想很简单, 把TRPO的硬约束转换成一个软约束, 即在我们优化的里面加一项作为惩罚项
同时呢,把先前的baseline也加上去,这样可以减小方差
常见的有两种加法:
- KL散度(PPO with Adaptive KL Penalty)
是一个超参数, 既然不好调, 那就让他自适应变化
如果KL散度>目标值, 那么, 反之
- Clip(PPO with Clip)
clip函数的表达式是, 即把x限制在[a,b]之间
而为什么要额外取一个min呢?这个min在的时候没有影响,但在的时候,允许使用左边的项, 更多地更新策略
- 这也是一个trick, 一个解释是, 我们希望在的时候(策略好), 更新的不要那么大(PPO的基础), 但是在的时候(策略不好), 我们希望更新的大一点, 允许一个大的回撤
- ref: https://stackoverflow.com/questions/46422845/what-is-the-way-to-understand-proximal-policy-optimization-algorithm-in-rl
实验表明CLIP PPO的效果更好, 所以下面给出的代码也是CLIP PPO的代码
其代码大致如下
import torch
import torch.nn as nn
import torch.optim as optim
import gym
# 定义策略网络
class PolicyNetwork(nn.Module):
def __init__(self, state_dim, action_dim):
super(PolicyNetwork, self).__init__()
self.fc1 = nn.Linear(state_dim, 128)
self.fc2 = nn.Linear(128, action_dim)
def forward(self, x):
x = torch.relu(self.fc1(x))
x = self.fc2(x)
return x
def act(self, state):
logits = self.forward(state)
probs = torch.softmax(logits, dim=-1) # 策略概率
dist = torch.distributions.Categorical(probs)
action = dist.sample()
return action, dist.log_prob(action), probs
# 定义值网络
class ValueNetwork(nn.Module):
def __init__(self, state_dim):
super(ValueNetwork, self).__init__()
self.fc1 = nn.Linear(state_dim, 128)
self.fc2 = nn.Linear(128, 1)
def forward(self, x):
x = torch.relu(self.fc1(x))
x = self.fc2(x)
return x
# 超参数
learning_rate = 3e-4
gamma = 0.99
clip_epsilon = 0.2
num_epochs = 10
num_episodes = 1000
batch_size = 64
# 创建环境
env = gym.make("CartPole-v1")
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
# 实例化策略网络、值网络和优化器
policy_net = PolicyNetwork(state_dim, action_dim)
value_net = ValueNetwork(state_dim)
optimizer_policy = optim.Adam(policy_net.parameters(), lr=learning_rate)
optimizer_value = optim.Adam(value_net.parameters(), lr=learning_rate)
# 训练循环
for episode in range(num_episodes):
state = env.reset()[0]
state = torch.tensor(state, dtype=torch.float32)
episode_rewards = []
log_probs = []
old_probs = []
states = []
actions = []
done = False
while not done:
action, log_prob, probs = policy_net.act(state.unsqueeze(0))
next_state, reward, terminated, truncated, _ = env.step(action.item())
done = terminated or truncated
episode_rewards.append(reward)
log_probs.append(log_prob)
old_probs.append(probs)
states.append(state)
actions.append(action)
state = torch.tensor(next_state, dtype=torch.float32)
# 计算回报
returns = []
R = 0
for r in episode_rewards[::-1]:
R = r + gamma * R
returns.insert(0, R)
returns = torch.tensor(returns, dtype=torch.float32)
# 计算优势函数 (这里使用简单的回报作为优势函数,可以替换为更复杂的估计方法)
advantages = returns - value_net(torch.stack(states)).squeeze(-1)
# PPO 损失函数
log_probs = torch.stack(log_probs)
old_probs = torch.stack(old_probs)
ratio = torch.exp(log_probs - torch.log(old_probs.gather(1, actions.unsqueeze(1)).squeeze(1))) # 重要性采样比
surrogate1 = ratio * advantages
surrogate2 = torch.clamp(ratio, 1 - clip_epsilon, 1 + clip_epsilon) * advantages # 裁剪策略
loss_policy = -torch.mean(torch.min(surrogate1, surrogate2)) # PPO 损失函数
loss_value = nn.MSELoss()(value_net(torch.stack(states)).squeeze(-1), returns)
# 更新参数
optimizer_policy.zero_grad()
loss_policy.backward()
optimizer_policy.step()
optimizer_value.zero_grad()
loss_value.backward()
optimizer_value.step()
print(f"Episode: {episode+1}, Total Reward: {sum(episode_rewards)}, Policy Loss: {loss_policy.item()}, Value Loss: {loss_value.item()}")
env.close()
还可以把这玩意并行化
(the approximate param values are: K = 3-15, M = 64-4096, T (horizon) = 128-2048):